Yamaha brevetta il regolatore di aderenza: non varrà in MotoGP ma in Superbike forse sì
MotoGPsabato, 14 febbraio 2026 alle 16:15
di Marc Seriau/paddock-gp
Leggere i brevetti depositati dai vari costruttori coinvolti nella MotoGP è sempre istruttivo, ma questa volta l'invenzione tecnica Yamaha per trovare aderenza al posteriore purtroppo non sarà applicabile alla M1… Ma chissà, forse tornerà utile per le R1 in Superbike?
Un piccolo flashback
Dalla fine del 2018, Ducati ha introdotto in MotoGP una serie di sistemi pensati per limitare le impennate e aumentare il grip in accelerazione. A partire dal dispositivo holeshot testato da Jack Miller, si è arrivati rapidamente ai dispositivi di assetto rialzato, prima al posteriore e poi all'anteriore (agosto 2021).
Dal 2023, i dispositivi di assetto anteriore sono stati vietati. Restano solo i dispositivi holeshot per la partenza. I dispositivi di assetto posteriore che sono continuo sviluppo: Ducati ne serà uno di nuova concezione nel Mondiale che scatta fra pochi giorni.Nel 2027 però questo dispositivo sarà messo al bando.
Ecco perché, quando abbiamo visto questo brevetto depositato da Michiharu Hasegawa (un dipendente di Yamaha Hatsudoki Kabushiki Kaisha), che presumibilmente garantiva l'aderenza posteriore, inizialmente abbiamo pensato che si trattasse di una sorta di soluzione provvisoria per i futuri regolamenti della MotoGP.
Descrizione:
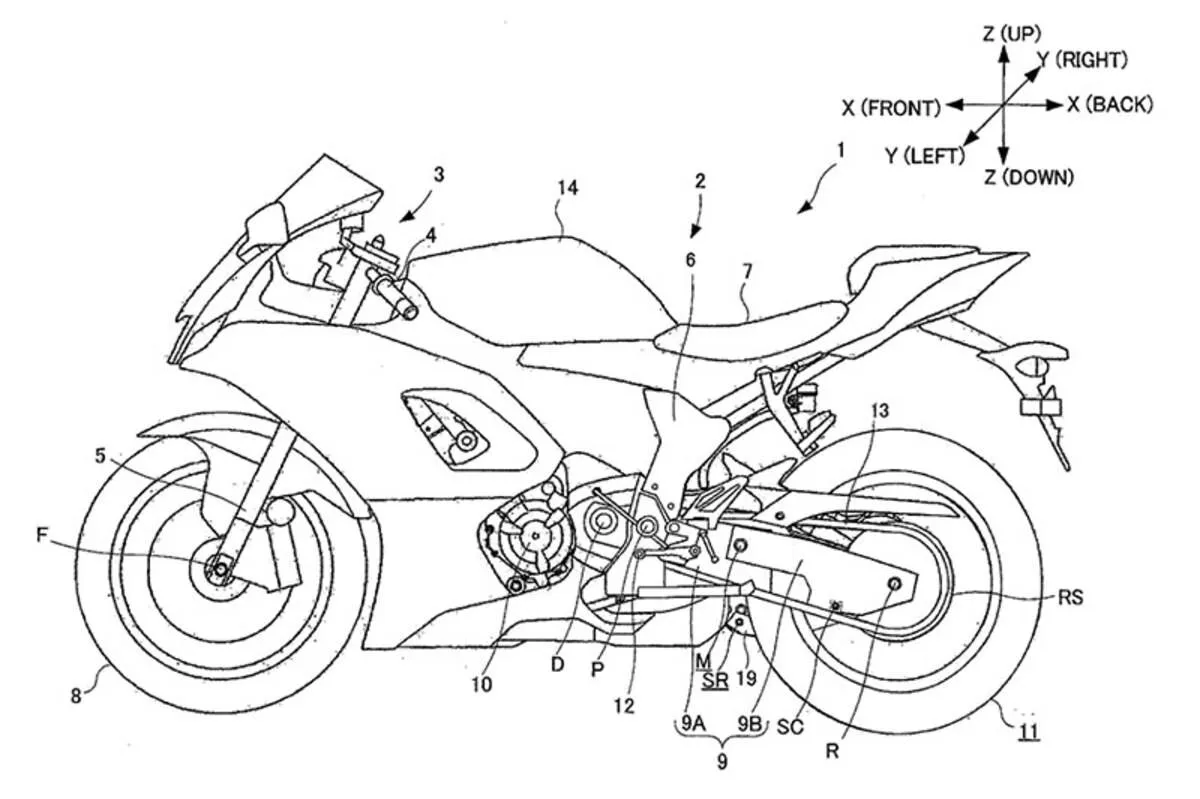
"Una motocicletta (1) è composta da un telaio (2), un perno di articolazione (P) e un forcellone oscillante (9). Il perno di articolazione (P) è supportato dal telaio (2). Il forcellone oscillante (9) è collegato al telaio (2) tramite il perno di articolazione (P). Il forcellone oscillante (9) ruota attorno al perno di articolazione (P) rispetto al telaio (2). Il forcellone oscillante (9) supporta una ruota posteriore (11) tramite un perno ruota posteriore (R)."
Il braccio posteriore (9) comprende almeno un primo braccio (9A), un albero rotante (M) e un secondo braccio (9B). Il primo braccio (9A) è collegato al telaio (2). Il primo braccio (9A) ruota attorno all'albero rotante (P) rispetto al telaio (2). L'albero rotante (M) è situato all'estremità posteriore del primo braccio (9A). Il secondo braccio (9B) è collegato al primo braccio (9A) tramite l'albero rotante (M). Il secondo braccio (9B) ruota attorno all'albero rotante (M) rispetto al primo braccio (9A). Il secondo braccio (9B) supporta la ruota posteriore (11) tramite l'asse della ruota posteriore (R)".
In sintesi, un doppio braccio oscillante articolato su due assi, la cui inclinazione si scopre poi essere gestita da un attuatore controllato elettronicamente.

Soluzione Yamaha... Non per le M1
Ahi! Sembra che la possibilità di vedere una cosa del genere in MotoGP sia finita, visto che tutti i controlli elettronici relativi alle sospensioni sono vietati!
È un peccato perché, dopo 45 pagine di formule complicate, grafici astrusi e tabelle dello stesso genere, comprese quelle sulle conseguenze dell'effetto a catena, che inevitabilmente riportano alla mente il lavoro di Eric Offenstadt, le promesse erano allettanti...
"[0047] La forza di presa della ruota posteriore può essere regolata durante l'accelerazione della motocicletta.
[0051] La forza di presa della ruota posteriore può essere regolata quando la motocicletta sta decelerando.
[0053] La forza di presa della ruota posteriore può essere regolata durante la svolta della motocicletta.
[0057] La forza di presa della ruota posteriore può essere regolata quando l'unità di controllo è azionata dal pilota".

Quindi, sicuramente non sarà possibile adottarlo in MotoGP sulla M1. Ma per la R1, perché no?


Continua a leggere
Potrebbe anche piacerti



Altre notizie


Articoli popolari




Loading

